İnsansız deniz araçlarında (İDA) otonomi

13/10/2022 15:00
13/10/2022 15:00
Meteksan Savunma’nın yayını Meteksan Savunma Gazetesi’nin 39. sayısında, Haberleşme Yazılım Tasarım Teknik Lideri Dr. Onur Öztürk’ün kaleme aldığı makalede, insansız deniz araçlarında (İDA) otonomi konusu ele alınıyor:
İNSANSIZ DENİZ ARAÇLARINDA OTONOMİ
Meteksan Savunma ve ARES Tersanesi ortaklığında geliştirilen ULAQ Silahlı İnsansız Deniz Aracı’nın (SİDA) Deniz Kurdu 2021 tatbikatında gerçekleştirdiği başarılı füze atışı gösterimiyle birlikte, SİDA konseptinin savunma sanayii karar vericileri ve takipçileri tarafından artan derinlikteki tartışmalara konu edildiğini rahatlıkla söyleyebiliriz. Ülkece bir yandan konvansiyonel su üstü ve su altı platformlarıyla, hatta diğer kara ve hava unsurlarıyla birlikte taktik sahada SİDA’ların etkin kullanım yöntemleri üzerinde çalışırken, diğer yandan da sayılı ülkenin sahip olduğu teknoloji hazırlık seviyesine ULAQ ile erişmenin haklı gururunu yaşıyoruz.
Peki, bir İDA’nın uzaktan kullanılabilmesi teknolojik anlamda gelinebilecek son noktayı mı ifade eder? Elbette ki hayır… İki temel nedenden dolayı İDA’ların aynı zamanda otonom seyir yapmalarına da ihtiyaç duymaktayız. İpuçlarını yukarıdaki anlatımdan da yakalayabileceğimiz gibi uzaktan kontrol, güvenilir bir haberleşme kanalının var olmasını gerektirmektedir. Maalesef haberleşme sistemlerinin tamamı RF yayılım ortamı koşullarından, mesafeden ve istenmeyen karıştırıcılardan etkilenmektedir. Bu nedenle İDA’larda, uzak kaptan ile haberleşmenin ve dolayısıyla platform kontrolünün sağlanamadığı durumlarda, haberleşmenin tekrardan sağlanacağı ana kadar kendi kendini idare edecek yazılım ve donanım bileşenlerinin olması gerekmektedir. Aksi takdirde hem İDA’nın hem de harici deniz unsurlarının güvenliği tehlike altına girmiş olur. İDA’lardaki otonom kabiliyetleri ön plana çıkaran diğer bir neden ise, sürü halinde görev yapabilmeleridir. Sığırcık kuşu ya da balık sürülerinin bir armoni içerisinde gerçekleştirdiği toplu hareketleri gözümüzün önüne getirdiğimizde, benzer sürü kabiliyetlerinin İHA’lara olduğu gibi İDA’lara da uygulanabilir olduğunu anlayabiliriz. Sürü, tanımı gereği içeresindeki unsur sayısı üzerine bir sınır koymamaktadır. Maalesef ki aynı ölçeklenebilirliği bu unsurları kontrol edecek operatörler için sağlamamız mümkün değildir. Yeterince operatör bulabilsek bile insan hatalarından dolayı yakın mesafelerde seyredilen bu görevlerde, hatalar kaçınılmaz olacaktır.
İDA’larda otonomi yeteneğinin öneminden bahsettiğimize göre, biraz da bu yeteneğin kendisine değinebiliriz. Otonomi, robotik araştırma alanının bir konusu olmakla birlikte bir sistemin üzerindeki algılayıcılar vasıtasıyla bilinen ya da bilinmeyen bir ortamda insan müdahalesi olmadan görev yapabilmesi olarak tanımlanabilir. İDA’lar özelinde otonomi yeteneği;
• Platform üzerindeki kamera, seyir radarı, lidar, sonar, Küresel Konumlama Sistemleri (KKS), pusula, Ataletsel Ölçüm Birimi (AÖB (INS)) vb. algılayıcı verilerinin işlenerek birleştirilmesinden,
• İçerisinde bulunulan ortamın 3-boyutlu (derinlik nedeniyle) resminin sanal olarak oluşturulmasına ve
• Platformun yakıt, su alma, yangın vb. anlık durum bilgileri de gözetilerek tanımlı görev(ler)in tek başına ya da harici diğer unsurlarla birlikte değişken koşullar altında icrası için platformun 2-boyutlu bir uzayda fiziksel kontrolünün yapılmasına kadar uzanan birçok konuda derinlemesine uzmanlığı gerektirmektedir. Başarılı ve gürbüz bir İDA otonomi sistemi, ancak ve ancak, sinyal işlemeden, algılayıcı birleştirmeye (sensör fusion); yapay zekâdan kontrol teorisine birçok bilimsel dalın, gerçek zamanlı uygulama geliştirme ve donanım/yazılım seviyesi tasarım yedekliliği gibi mühendislik yaklaşımlarıyla harmanlanması sonucu ortaya çıkabilmektedir. Bu nedenle hem yaygın, hem de derin uzmanlık gerektirmektedir. İDA’larda otonomi bu anlamda hava ve karadaki muadilleriyle benzerlikler göstermektedir. Her ne kadar İnsansız Hava Araçlarında (İHA) otonomi 3-boyutlu bir problem olarak karşımıza çıksa da, günümüzde insanlı ve insansız sistemler için denizdekinin aksine Uçuş Bilgi Bölgesi (Flight Information Region (FIR)) adındaki ayrık hava sahaları belirlenmektedir. Öte yandan, İnsansız Kara Araçları (İKA) ve otonom sivil araçları denizdekine benzer şekilde insanlı sistemler ile bir arada yer alırken bu araçların sadece sürülebilir bölgeler ve yol şeritleri içerisinde hareket serbestliklerinin bulunduğunu söyleyebiliriz.
Otonom bir İDA, üzerindeki faydalı yüklerin çeşidine göre, çevre gözetleme, keşif, takip, koruma, karıştırma, arama kurtarma gibi birçok görevde kullanılabilir. İcra edeceği bu görevlerden bağımsız olarak, çarpışma önleme amacıyla, İDA’dan su üstündeki diğer deniz unsurlarından sakınması beklenmektedir. Bu amaçla, harici deniz unsurlarının konum ve hız bilgileri kamera, seyir radarı ve lidar gibi algılayıcılardan doğrudan ya da dolaylı olarak elde edilebilmektedir. Kamera ve lidar, görece yakın mesafelerdeki hedefleri tespit ve takip etmede kullanılabilirken, seyir radarı daha uzak mesafelerdeki hedefler için kullanılabilmektedir. Öte yandan kamera ve lidar, seyir radarına göre daha yüksek detayda ve çözünürlükte bilgi sunabilmektedir. Bu üç algılayıcının da çıktıları birbirinden farklıdır. Kamera 2-boyutlu (x-y düzlemi olarak adlandıralım) ve renkli (termal kameralar hariç) bir görüntü sağlarken, lidar 3-boyutlu uzayda (x-y-z) nokta bulutu, seyir radarı ise 2-boyutlu mesafe-yanca (azimuth) düzleminde görüntü sağlamaktadır. Bu üç algılayıcıdan elde edilen verilerin birleştirilmesi yoluyla deniz üzerinde seyreden unsurların İDA tarafından algılanması sağlanabilir. Bu “taktik deniz resmi”, İDA otonomi yazılımları tarafından oluşturulduktan sonra, geriye denizcilik kurallarına göre mevcut seyir rotasının uyarlanması ve bu güncel rotaya göre platformun kontrolünün yapılması kalmaktadır.
Otomobil kullanırken uymak durumunda olduğumuz kurallar gibi, deniz trafiğini düzenleyen ve geçiş üstünlüklerini tanımlayan da bir dizi kural bulunmaktadır. COLREGs [1] adındaki bu evrensel kurallar dizisi, bir Birleşmiş Milletler kuruluşu olan International Maritime Organization (IMO) tarafından 1972 yılında düzenlenen bir konferansta her türlü deniz aracını kapsayacak şekilde tanımlanmıştır. Otonom bir İDA’nın denizde güvenle seyretmesi sadece diğer unsurlardan kaçınabilmesine değil, aynı zamanda ilgili kaçınma manevralarını COLREGs kurallarına uygun şekilde icra etmesine bağlıdır. Günün sonunda, seyir halindeki diğer insanlı ve insansız deniz araçları söz konusu İDA’nın otonom sürüşte olup olmadığını bilmeden COLREGs kurallarına uymasını bekleyecektir. Aksi bir davranış, diğer araçları da COLREGs kuralları dışına çıkarmak suretiyle deniz trafiğinin güvenliğini tehlikeye atacaktır.
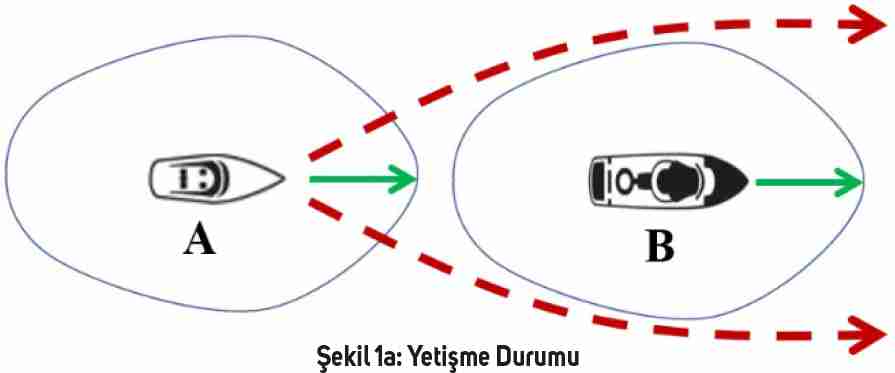
COLREGs; genel, seyir, aydınlatma, işitsel ve görsel uyarı işaretleri, istisnai durumlar ve uyumluluk doğrulaması gibi 6 adet başlık altında toplamda 41 adet kuraldan oluşmaktadır [2]. Ülkemizde, Denizde Çatışmayı Önleme Tüzüğü [3] içerisinde de yer alan seyir ile ilgili aşağıdaki üç kural, çeşitli karşılaşma durumlarında takip edilmesi gereken davranışları belirlemektedir. Bu kuralların işletimi, örnek senaryolar için Şekil 1’de [4] gösterilmiştir.
• COLREGs Kural 13 (Yetişme Durumu (overtaking)): Bir deniz aracı (Şekil 1a-A) önündeki bir deniz aracına (Şekil 1a-B) kemeresinin 22.5 dereceden daha gerisindeki bir yönden yaklaşıyorsa, yetişme durumundadır. Yetişme durumundaki deniz aracı, iskele ya da sancak tarafından diğer deniz aracını geçebilir.
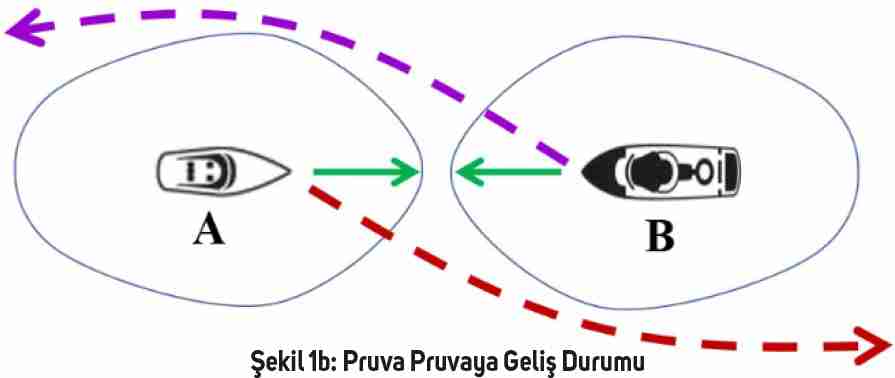
• COLREGs Kural 14 (Pruva Pruvaya Geliş Durumu (head-on)): İki adet kuvvetle yürütülen deniz aracı (A ve B) birbirlerine karşı veya karşıya yakın bir rotada yaklaşıyor ise (Şekil 1b), deniz araçlarının her biri diğerinin iskelesinden geçmek üzere rotasını sancağa değiştirmek zorundadır.
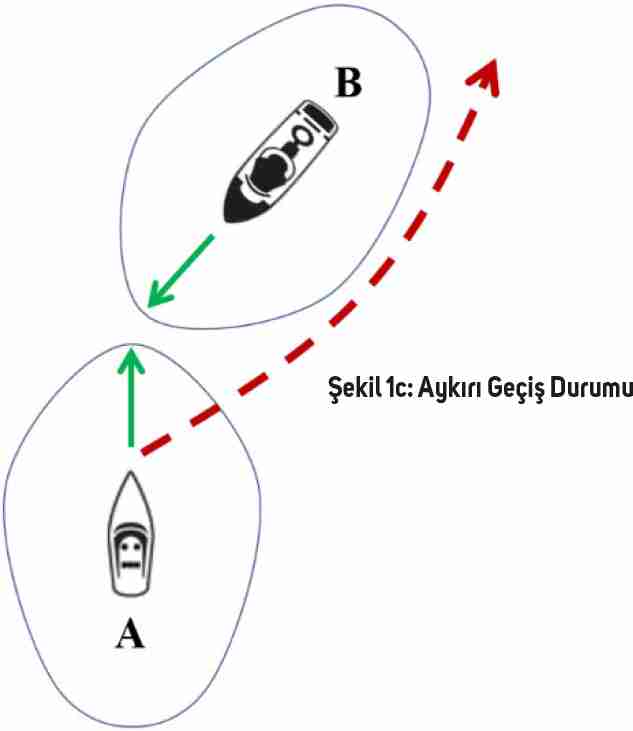
• COLREGs Kural 15 (Aykırı Geçiş Durumu (crossing)): İki adet kuvvetle yürütülen deniz aracı (A ve B) çatışma tehlikesi doğuracak şekilde birbirine aykırı olarak yaklaşıyor ise, diğer deniz aracını sancak tarafından gören deniz aracı (Şekil 1c-A) mümkünse diğer deniz aracının (Şekil 1c-B) pruvasından geçmeyecek şekilde yol vermek zorundadır.
COLREGs kuralları her ne kadar açık görünseler de aslında yeterince nesnel olmadıklarını söyleyebiliriz. Örneğin iki deniz aracının birbirlerine ne kadar yakınlıktayken bu kuralları işletmeye başlayacakları hatta araçların hangi hızla seyretmeleri gerektiği COLREGs’te tanımlanmamıştır. Bunun nedeni mevcut görüş, hava ve deniz durumları ve deniz araçlarının hızlanma ve durma kabiliyetleri gibi faktörlerin söz konusu hız ve mesafe değerlerini etkileyecek olmasıdır. Tüm bunlara bir de çoklu karşılaşma durumlarını eklersek, COLREGs kurallarına rağmen neden hala deniz kazalarının yaşanmaya devam ettiğini daha iyi anlayabiliriz. Zira yapılan bir çalışmaya göre denizde çarpışmaların %89-96’sında insan hatalarının parmağı bulunmaktadır [5].
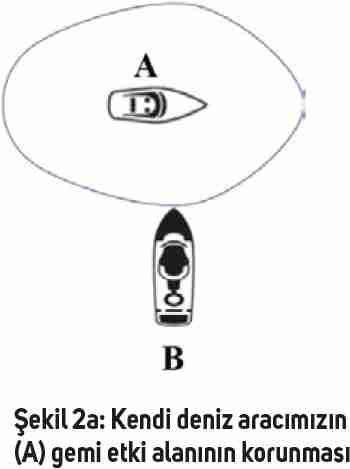
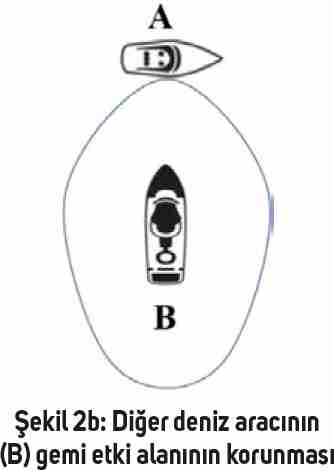
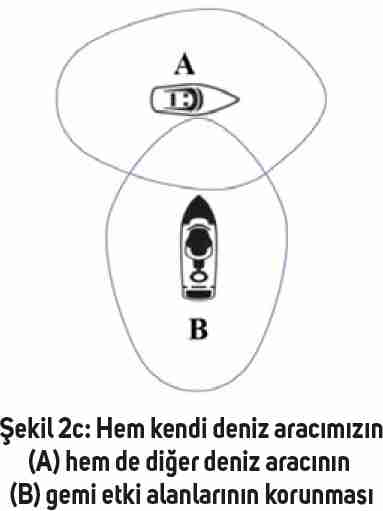
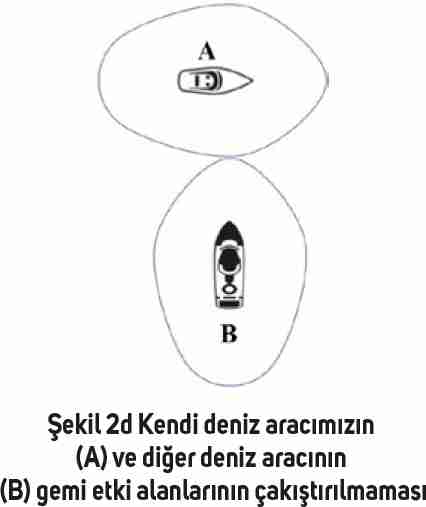
Otonom İDA’lara dönecek olursak, denizde çatışmayı önleme algoritmaları için COLREGs kurallarının matematiksel olarak ifade edilmeleri gerekmektedir. Bu amaçla yapılan çalışmaların önemli bir bölümü gemi etki alanı (ship domain) üzerinde yoğunlaşmaktadır. Gemi etki alanı, bir deniz aracının güvenli bir şekilde seyredebilmesi için etrafında bırakılması gereken “güvenli alan” olarak tanımlanabilir. Gemi etki alanı, yaklaşımdan yaklaşıma değişmekle birlikte deniz aracının boyutlarına, anlık hızına, manevra kabiliyetlerine hatta diğer deniz araçlarının benzer parametrelerine bağlı olarak hesaplanabilmektedir [6]. Gemi etki alanı bir kez hesaplandıktan sonra, Şekil 2’de de [6] gösterildiği gibi, çatışma önleme amacıyla dört farklı yöntem izlenir:
• Kendi deniz aracımızın (A) gemi etki alanının korunması (Şekil 2a)
• Diğer deniz aracının (B) gemi etki alanının korunması (Şekil 2b)
• Hem kendi deniz aracımızın (A) hem de diğer deniz aracının (B) gemi etki alanlarının korunması (Şekil 2c)
• Kendi deniz aracımızın (A) ve diğer deniz aracının (B) gemi etki alanlarının çakıştırılmaması (Şekil 2d)
Bu kriterler, gemi etki alanının şekli ve büyüklüğü kadar çatışma önleme algoritmalarının performansında belirleyici olmaktadır [6].
Son on yılda yapay zekâ alanında gerçekleşen derin öğrenme devriminin yarattığı rüzgârla gelişimi hız kazanan otonom sistemlere hem sivil hem de askeri alanda rastlamak artık olağan bir durum haline geldi. İDA’ların otonomi yeteneklerine ufak da olsa bir pencere açtığımız bu yazıda, arka planda yatan teknolojilerin karmaşıklığına biraz olsun değinmeye çalıştık. Otonom sistemlerin toplam çalışma saatlerinin artmasıyla birlikte daha da olgunlaşacaklarını ve bu sayede, insanlar tarafından üstlenilmesine alışageldiğimiz görevlerin, birer birer bu sistemlere devredilmesine çok da uzak olmayan bir gelecekte şahit olacağımızı değerlendiriyor ve çalışmalarımızı bu anlayışla sürdürüyoruz.
Referanslar
[1] COLREGS - International Regulations for Preventing Collisions at Sea
[2] https://www.imo.org/en/OurWork/Safety/Pages/Preventing-Collisions.aspx
[3] Denizde Çatışmayı Önleme Tüzüğü, https://www.mevzuat.gov.tr/MevzuatMetin/2.5.714561.pdf
[4] Deng, F., Jin, L., Hou, X., Wang, L., Li, B., & Yang, H. (2021). COLREGs: Compliant Dynamic Obstacle Avoidance of USVs Based on the Dynamic Navigation Ship Domain. Journal of Marine Science and Engineering, 9(8), 837.
[5] Campbell, S., Naeem, W. and Irwin, G.W., 2012. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annual Reviews in Control, 36(2), pp.267-283.
[6] Szlapczynski, R. and Szlapczynska, J., 2017. Review of ship safety domains: Models and applications. Ocean Engineering, 145, pp.277-289