İnsansı robotların gelişimi
03/07/2023 17:26
03/07/2023 17:26
Yapay insan düşüncesi modern zamanların çok öncesine dayanan fakat modern zamanların bile iddialı argümanları arasında yer almakta ve teknokültürün nihai amaçlarından birini oluşturmaktadır. İleri teknoloji tefekkürlerinde bile ortaya çıkan yapay insanlar, yüzlerce yıllık edebi ve felsefi mirasa gönderme yapmaktadır. (Kakoudaki, 2014).
İnsansı robotların, biyomimetik ve robotiğin önemli bir dalını oluşturduğu ve yalnızca bilim ve mühendislik disiplinleriyle değil, aynı zamanda sosyal, yasal ve etik alanlarla da derinden bağlantılı olduğu düşünülmektedir. (Fukuda ve diğerleri, 2017).
Robot Kavramı ve Kronolojisi
Robot sözcüğü, 1920 yılında Çek yazar Karel Capek tarafından R.U.R. & Rossum’un Evrensel Robotları adlı bilim-kurgu tiyatro eseriyle ortaya atılmıştır. Kelimenin kökeni Çekçe “robota”dan gelmektedir. İşçilik, kölelik ve zorunlu çalışma anlamlarına gelen bu kelime, geniş bir yelpazede kullanılacak ve robotik başlığı altında birçok çalışmada geçecektir (URL 1, 2023).
Robotik ile ilgili çalışmaların temeli otomasyona dayanmakta olup, tarihin ilk dönemlerinden beri robotik ile ilgili çalışmalar sürdürülmüştür. Yüzlerce yıllık edebi felsefi mirasta yer alan bir hayal olarak tahayyülde şekillenen robot fikri, mekanik-elektronik sürecin bir sonucudur ve temelinde otomasyonu barındırmaktadır (Kakoudaki, 2014).
Çekiç-el ilişkisinde olduğu gibi alet/edevat kullanımı mekanikliğin beden vasıtasıyla deneyimlendiği en temel ve yaygın kiptir. Çünkü aletler, bedensel dokunuşun izini kendi tasarımında taşırlar. Aletler, sadece bedenin sınırlarını genişletmekle kalmaz; aynı zamanda insan eyleminin etkisini ve şiddetini değiştirerek dünyayla başa çıkma yollarımızı değiştirir ve dünyaya belli bir açıdan bakmamızı sağlar.
Cezeri, Da Vinci gibi dehaların ürettiği otomatlarda/ robotlarda en üst örneklerini gördüğümüz bu düşünce biçimi, elektriğin devreye girmesiyle değişir. Zira mekanik açıklamalar ve mekanik bedenler, izah edilebilir şablonlara sahipken; elektrik, tasarımlara olan bakış açısını değiştirecek ve süreci hızlandırabilecektir. Oysa Thomas Edison’un 1882 yılında New York’a ilk elektrik kablolarını döşediğinde işçilerin başında durması gerekmektedir. Zira İrlandalı işçiler kablolardaki şeytandan korkmaktadır. Elektrik görünmeyene atmosfer ve auraya çağrışımlar yapmaktadır. Bu açıklanamaz yeni şey, yapay insan tasarımlarına bakış açısını tamamen değiştirecektir (Kakoudaki, 2014).
Aşağıda derlenen kronolojide, bu değişimle birlikte -genel hatlarıyla robot kelimesinin ilk kullanıldığı dönemden, insansı robotların ilk ortaya çıktığı zamana kadar- robotik alanında önemli değişim noktaları ve gelişmeler özetlenmektedir (URL 1, 2023):
· 1940: Massachusetts Teknoloji Enstitüsü (MIT)’nde radar teknolojisinin geliştirilmesi, cisimleri insan etmeni olmadan algılama konusunda en önemli adımlardan birisi oldu.
· 1941: Isaac Asimov “Robot” kelimesinden “Robotik” kelimesini türeterek ilk kez kullandı. Robotik, robot teknolojisi ile ilgili tüm alanları kapsayan bir tanım olarak kabul ediliyor (Isaac Asimov “Runaround” isimli hikâyesinde Robotların üç yasasını yazdı).
· 1946: George Devol; genel amaçlı, manyetik kayıt yapabilen ve tekrar çalıştırılabilen bir cihaz geliştirdi.
· 1946: J. Presper Eckert ve John Mauchly, Pennsylvania Üniversitesi’nde ilk elektronik bilgisayar olarak bilinen ENIAC isimli bilgisayarı geliştirdi. Whirlwind isimli bir başka bilgisayar MIT’de ilk olarak bir bilimsel problemi çözdü.
· 1948: MIT’den Norbert Wiener elektronik, mekanik ve biyolojik sistemlerin denetim ve iletişimini inceleyen, “Sibernetik” başlıklı kitabı yayınladı.
· 1964: Dünyanın önde gelen bazı üniversite ve araştırma merkezlerinde (MIT, Stanford Araştırma Enstitüsü, Stanford Üniversitesi, Edinburgh Üniversitesi) ilk kez Yapay Zekâ araştırmaları başladı ve laboratuvarları açıldı.
Bu dönemde robotik alanında gelişmeler hızlanırken, aynı zamanda insansı robotlarla ilgili çalışmalar da ivme kazanmıştır.
İnsansı Robotların Gelişimi
Japonya’daki Waseda Üniversitesi’nden Ichiro Kato tarafından statik olarak ve daha sonra dinamik olarak dengelenmiş ilk insansı robot olan WABOT, 1967’de geliştirildi. O zamandan beri birçok bilim insanı ve araştırmacının üzerinde çalıştığı bu konuda bir diğer dönüm noktası, 1997’de Fransa’nın Grenoble kentinde düzenlenen 1997 IEEE Uluslararası Akıllı Robotlar ve Sistemler Konferansı olmuştur. Bu konferansta Honda, (IROS) İnsansı P2’yi tanıtmıştır.
İlerleyen yıllardaki geliştirmeler neticesinde şirket, 2000 yılında ASIMO robotunu dünyaya duyurarak, bu alanda önemli bir başarıya imza atmıştır. ASIMO robotunu önemli kılan unsurların başlıcaları, insan benzeri android şekli, doğala yakın yürüyüşü ve merdiven çıkma gibi işlevsellikleriydi (Fukuda ve diğerleri, 2017).
Bu işlevsellik aynı zamanda uzun süredir devam eden (özellikle kinematik ve kontrol açısından) zorluklarla ilgili bazı çözümlere ulaşıldığını ortaya koymuştur.
Bu robotların tasarımında harekete geçmeye yardım eden ve jest yapan motorlar (aktüatörler) son derece önemlidir. İnsansı robotlar için kullanılan aktüatörler kabaca üç türe ayrılabilir (Hashimoto, 2020):
◊ Pnömatik aktüatörler,
◊ Hidrolik aktüatörler ve
◊ Elektrikli aktüatörler.
İnsan vücudu dinamiktir. Kolayca hareket edebilir, döner, zıplar, dans eder. Bütün bunlar, on ila on beş saniye arasında gerçekleşebilir. Bir insansı robot yapmak için, bu hareketleri esnek bir şekilde ve aynı zaman dilimi içinde ya da hatta daha az zamanda taklit edebilecek güçlü, verimli aktüatörlere ihtiyaç vardır (Fukuda ve diğerleri, 2017).
İnsan hareketleri, eylemleri ve bilişsel becerileri duyularla ilgilidir. Proprioseptif duyu, görme, işitme, duyma, koklama, taktil duyu (dokunma) ve denge duyusu (vestibuler duyu) robotlarda sensör olarak karşılık bulmaktadır. Bu zorunlu durum çok karmaşık ve uzun çalışmaları gerektirmektedir. Yapay zekâ ve kodlama, bu birliktelikteki temel anahtar olmaktadır. Ayrıca otonom robotlar için geleneksel mühendislik yaklaşımının yeterli olmadığı düşüncesi öne çıkmış ve insan beyni ile ilgili yaklaşımda beyin ve muhakemenin biyolojiden önemli ölçüde etkilendiğini ileri sürülmüştür (Pessoa, 2019).
İnsansı robotlar çok disiplinli yönleri sebebiyle farklı alanlar için de gelişime olanak sağlamaktadır. Nörobilim bu alanların önde gelenlerindendir. Bu kapsamda Neurobotics projesi, I-Cub, İnsan Beyni Projesi gibi modeller eş zamanlı gelişime örnek oluşturmaktadır.
İnsansı robotun, yalnızca mekanik tasarım ve kontrolde değil, aynı zamanda algılama ve tanıma yeteneklerinde de açıkça daha fazla araştırma ve geliştirmeye ihtiyacı vardır. Bu anlamda ASİMO sonrasında birçok insansı robot tasarlanmıştır. Bu çalışmaların temelinde hareket kabiliyetinin iyileştirilmesi ve bilişsel yeteneğin arttırılması fikirleri ön plana çıkmaktadır.
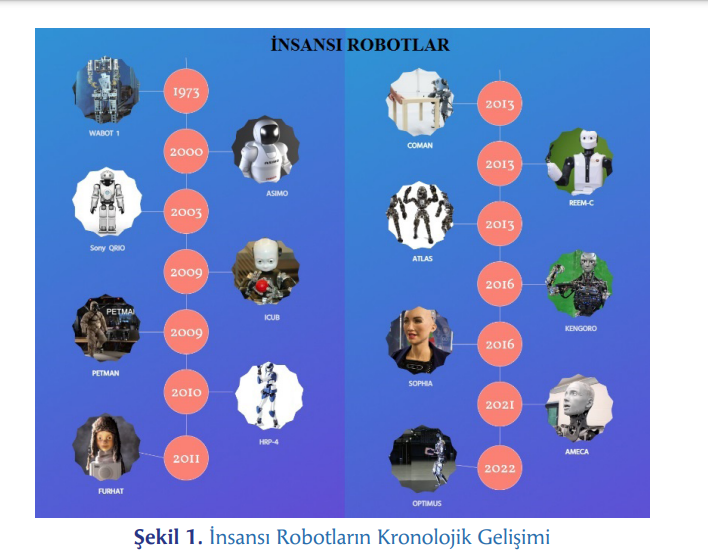
Petman (URL 3, 2013), Atlas, (URL 5, 2023) gibi hareket ve kinematik kabiliyet odaklı askeri robotlar ve Sophia (URL 4, 2023), Ameca tarzında bilişsel etkileşim ve iletişim odaklı robotlar dikkat çekmektedir (Fukuda ve diğerleri, 2017).
İnsansı robotlarla ilgili süreçte ön plana çıkan robotlar, Şekil 1’deki görselde kronolojik olarak verilmektedir.
Sonuç
Mekanik tasarımlar ve otomatlarla başlayan yapay insan düşüncesi, robotların gelişimiyle farklı bir noktaya evrilmiştir. Elektriğin kullanımı, bu değişikliğe yol açan en temel unsurlardan biri olmuştur. Ardından, İkinci Dünya Savaşı sonrasında bilgisayar bilimleri, sibernetik ve nihai olarak da yapay zeka alanında birbiriyle ilişkili gelişmeler yaşanırken, robotların üretimleri kolaylaşmış; tasarımları ve teknik özellikleri üst seviyelere çıkmıştır. Günümüzde ise insanı taklit eden robot teknolojilerinin, sadece mekanik ve kinematik düzlemde kalmayıp; bilişsel yeteneklerin de başarılı biçimde taklit edildiği ve gündelik hayatın her aşamasına dahil olabilecek kabiliyetlere ulaştığı görülmektedir.