Helikopter motor kontrol problemleri

01/06/2022 17:42
01/06/2022 17:42
TUSAŞ Motor Sanayii AŞ'nin (TEI) dergisi “TEI Post”un 137. sayısında, helikopter motorlarında kontrol problemleri ele alınıyor
"TEI Post" dergisinin 137. sayısının tamamına, mobil uygulamamızın dergi bölümünden ulaşabilirsiniz.
Dergide yer alan “Helikopter Motor Kontrol Problemleri” başlıklı yazıyı takipçilerimize sunuyoruz:
HELİKOPTER MOTOR KONTROL PROBLEMLERİ
HELIKOPTER ÇALIŞMA SISTEMI
Helikopterler, bir veya daha fazla yatay konumlanmış rotordan oluşan, dikey yönde iniş kalkış yapabilen hava araçlarıdır. Sabit kanatlı olan uçaklardan ayırmak için döner kanatlı hava aracı olarak da sınıflandırılmaktadır. Helikopterler, ulaşım, inşaat, kargo taşıma, arama ve kurtarma, yangınla mücadele gibi ticari amaçlarla kullanılabilmektedir.
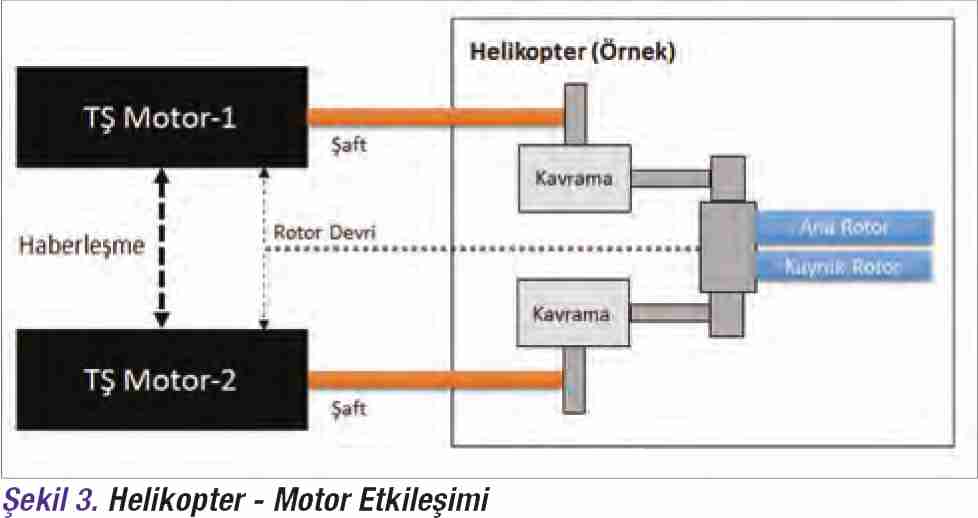
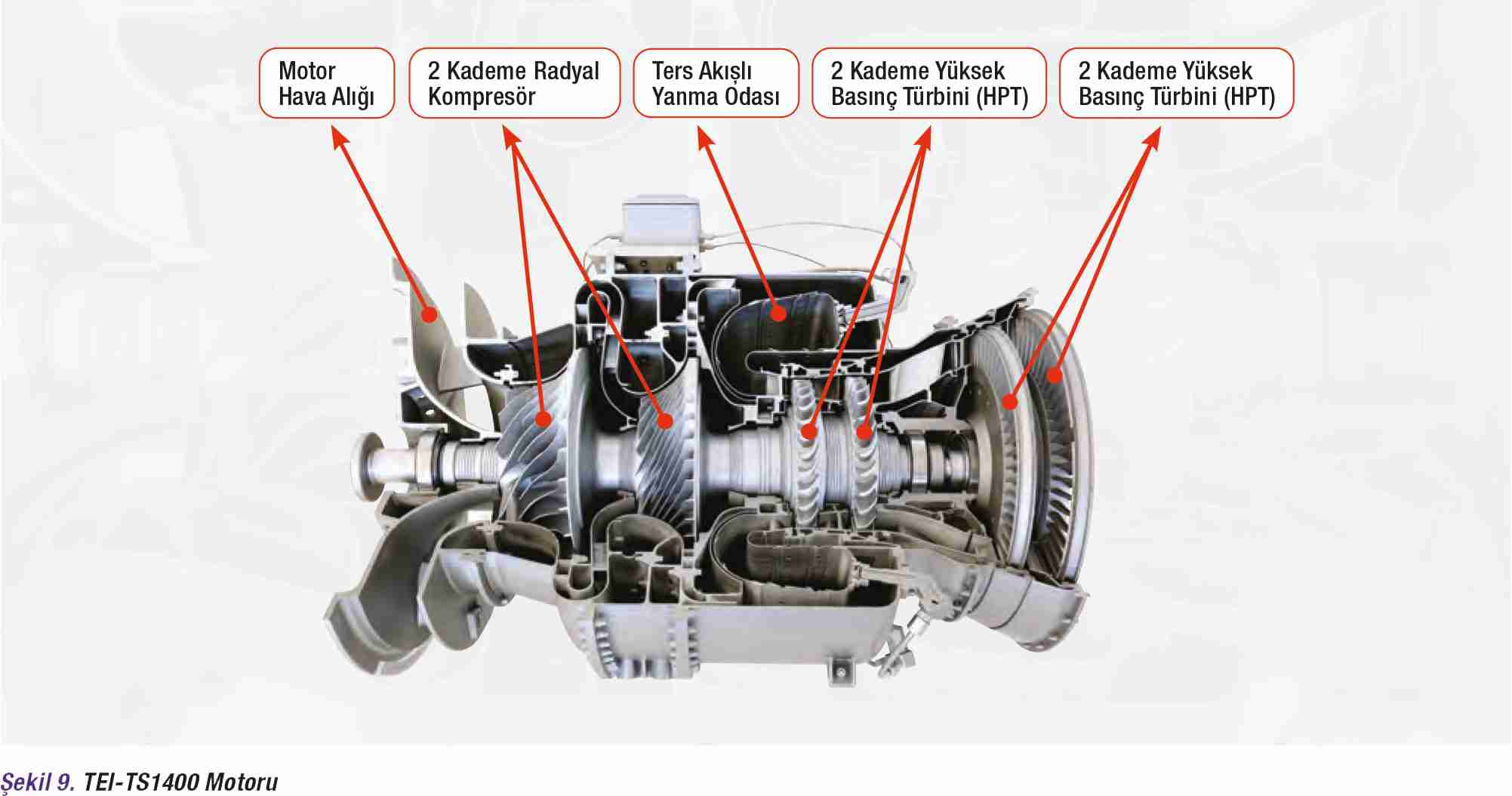
Helikopterler, itki sisteminin sağladığı güç ile üç öteleme, üç dönme olmak üzere altı farklı bağımsız hareket yapabilmektedir. İtki sistemi olarak pistonlu ve gaz türbinli motorlar kullanılabilmekle birlikte bu yazıda helikoptermotor etkileşimi olarak turboşaft motorun kullanıldığı varsayılmaktadır.
Helikopterde bir veya birden fazla motor kullanılabilmektedir. Motorun sağladığı güç, ana rotora ve kuyruk rotoruna helikopter üzerindeki dişli kutuları vasıtasıyla aktarılarak helikopterin yönelimi kontrol edilebilmektedir.
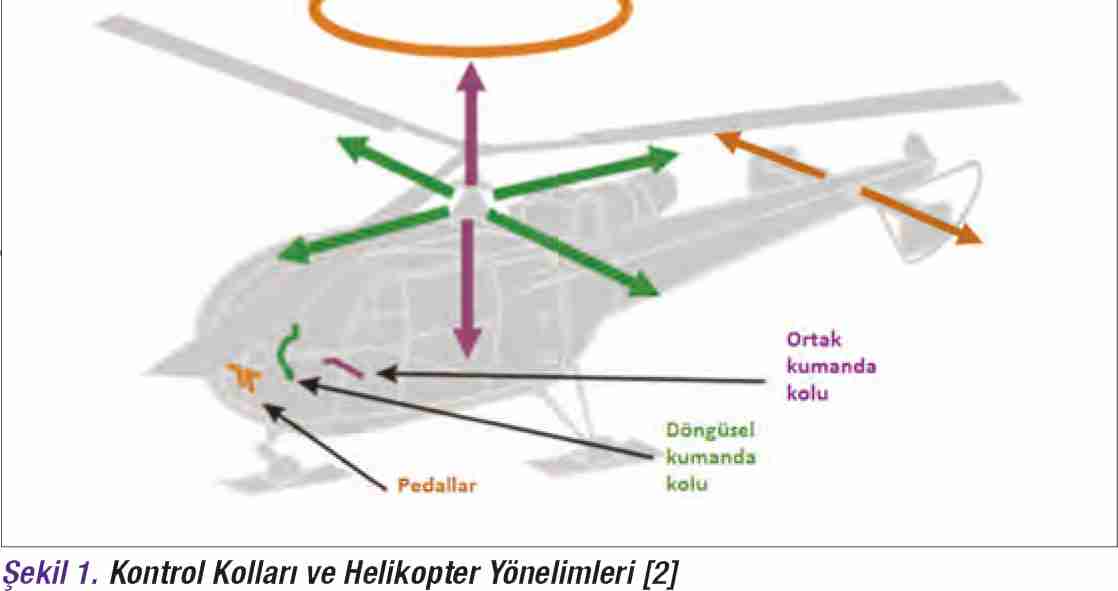
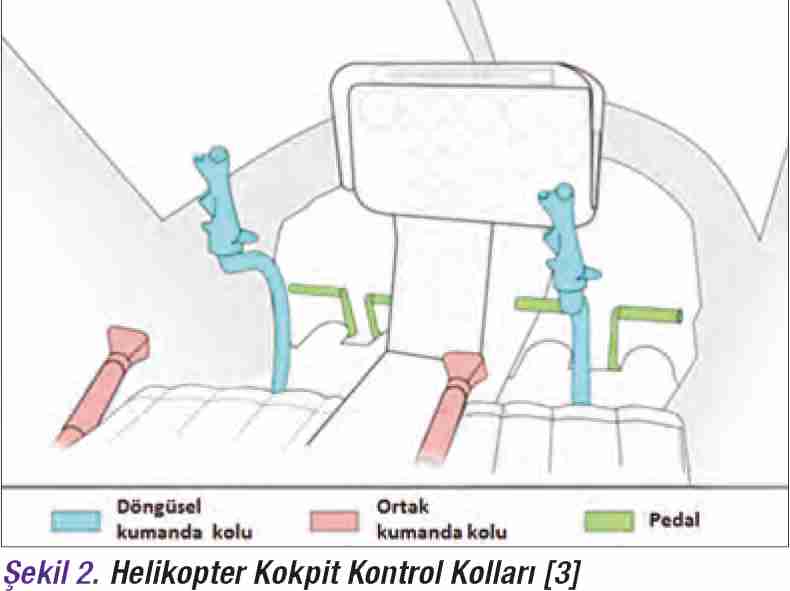
Ortak kumanda (collective) kolu, helikopter rotor kanatlarının hatve açılarını hareket ettirerek dikey yönde itki oluşmasını ve helikopterin yükselip alçalmasını sağlar. Döngüsel kumanda (cyclic) kolu, rotor kanat sisteminin tamamına eğim vererek helikopterin ileri, geri, sağa ve sola hareketini sağlar, ayrıca ileri yönde harekette dönüş yapma ve aşağı yukarı yalpa (pitch) açısı vermek için kullanılır [2]. Pedallar ise, kuyruk rotorunun kanat açılarını hareket ettirerek helikopterin özellikle havada asılı durumdayken dikey eksen etrafındaki dönme hareketini sağlar. Esasen, helikopterin ana rotoru dönüyorken Newton’un üçüncü yasası (etki-tepki) gereği gövde de dönmek istemektedir. Bu yüzden gövdenin dönmeden durabilmesi için bir miktar pedal açısı sürekli verilmek zorundadır. Şekil 1’de kontrol komutlarına göre helikopterin hareketi gösterilmektedir. Şekil 2’de tipik bir helikopterde kontrol kollarının yerleşimi görülmektedir.
Günümüz helikopterlerinde ana ve kuyruk rotorları geçici hâl manevraları dışında yaklaşık olarak sabit devirde dönmektedir. Motorun dönüş devri, dolayısıyla helikopterin dönüş devri, motorun kontrol sistemi tarafından kontrol edilmektedir. Motorun kontrol sistemi, rotor dönüş devirlerini ve pilotun yük talebini (ortak kumanda kolu bilgisini) izleyerek, rotorun sürekli hal koşullarında sabit devirde dönebilmesi için gerekli yakıtı ayarlamaktadır. Rotor üzerindeki yük arttıkça, rotor devri düşmek isteyecek fakat motor kontrol sistemi yakıtı artırarak dönüş devrini tekrar yükseltecektir.
Motor devirleri (örneğin 6.000 – 30.000 rpm arası) genellikle helikopterin rotor dönüş devrinden (250 – 600 rpm) yüksek olduğundan, helikopter üzerindeki dişli kutusu ile motorun devri düşürülür. Helikopterin rotorunu döndüren sistem motor olduğundan, motor devri (güç türbin dönüş devri) ile helikopter rotor dönüş devrinin normal şartlarda oransal olarak aynı olması beklenmektedir. Helikopterde yaşanabilecek bir motor arızası sonrasında, motoru helikopter rotor sisteminden ayıran, motor ataletinin ve yükünün helikopter rotor dönüşünü olumsuz etkilememesi için, helikopter dişli kutusu üzerine veya varsa motorun çıkış dişli kutusu içerisine konulan tek yönlü kavrama sistemi bulunmaktadır. Bu tek yönlü kavrama sisteminin çalışması, bisikletlerin arka tekerliğinde bulunan dişli sisteminin (ruble) çalışmasına benzemektedir. Motoru bisiklet pedalına, helikopter rotorunu ise arka tekerleğe benzetirsek; pedal arka tekerleğe tork verdiği sürece, pedalın devri ile arka tekerleğin dönüş devirleri oransal olacaktır; fakat pedalın dönmediği durumda arka tekerlek pedaldan bağımsız olarak dönmeye devam edecek ve tekerleğin devri pedalın devrinden daha büyük olacaktır. Bu koşula yani rotor devrinin motor devrinden daha fazla olduğu koşula otorotasyon denilmektedir.
Helikopter-Motor Etkileşim Konuları
Rotor Devir Kontrolü
Helikopter üzerinde, motorun çalışmasını, kapatılmasını, uçuş kipine alınmasını, uçuş eğitim kipi gibi bazı özelliklerin çalışmasını sağlayan birçok arayüz mevcuttur. Motor kontrol sistemine gönderilen çalışma komutuyla birlikte, motor kontrol sistemi motorun çalışmasını sağlayarak rölanti devrine getirir. Pilotun, motoru uçuş kipine almasıyla birlikte motor kontrol sistemi rölanti devrinin üzerine çıkarak, güç türbin dönüş devrini, dolayısıyla helikopter rotor devrini %100 devirde kontrol etmeye başlar.
Tork Sezinleme
Ortak kumanda kolu sinyali, helikopter rotor pallerinin hatve açısı ile orantılı bir bilgi sağlamaktadır. Normalde gaz türbinli bir motorun, rotor güç türbin motor devrini kontrol etmek için ortak kumanda kolu sinyaline ihtiyaç olmamakla birlikte, rotor devrindeki geçici hal sapmalarını azaltmak, dolayısıyla pilot iş yükünü azaltmak için de kullanılmaktadır. Bu sinyal kullanılarak pilotun talep ettiği tork seviyesi motor kontrol sistemi tarafından sezinlenir ve rotor devri çok düşmeden motorun gücü önden artırılmış veya azaltılmış olur.
Otorotasyon Sonrası Toparlanma
Otorotasyon, motordan güç almaksızın aerodinamik kuvvetler tarafından sürülmesi durumu olarak açıklanabilir. Otorotasyon durumunda helikopterin rotor dönüş devri, motorun devrinden yüksek olmaktadır. Bu durum motorların arızalanması veya helikopter manevraları esnasında ortaya çıkabilmektedir.
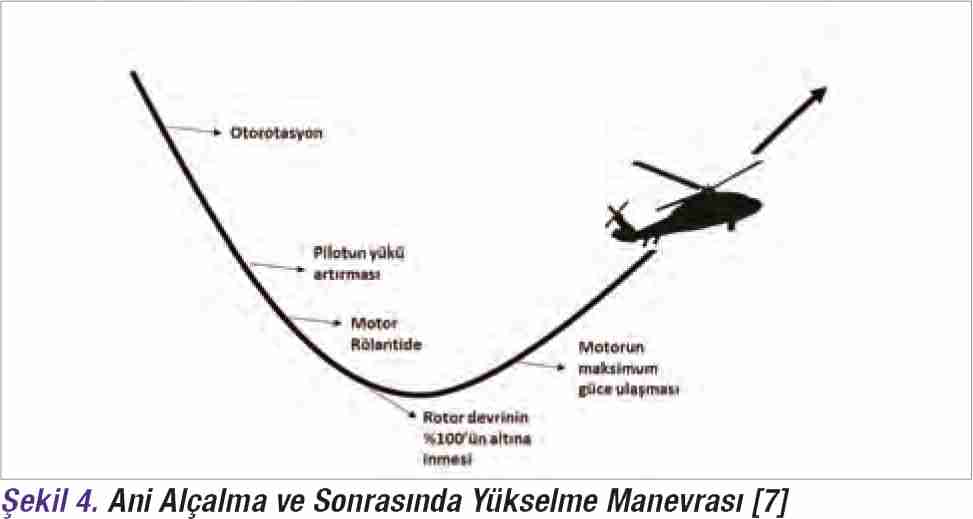
Helikopter uçuş esnasında bir engelden kaçmak için ani manevralar yapabilmektedir. Şekil 4’te gösterilen ve zorlayıcı bir manevra olan ani alçalma ve sonrasında ani yükselme manevrasında helikopter rotor devrinde önemli sapmalar olabilmekte ve helikopterin manevra kabiliyetini sınırlandırabilmektedir.
Bu manevrada ani alçalma esnasında helikopterin kinetik enerjisi de rotora aktarıldığından rotorun devri, Şekil 5’deki gibi ayarlanmış %100 devrin üzerine çıkmaktadır. Bu durumda, motor kontrol sistemi, güç türbin devrini %100’e düşürmek için motorun gücünü oldukça azaltacak, neredeyse rölanti gücü civarına indirecektir. Bu manevra sürerken, rotor devri %100’ün üzerindeyken (örneğin %108), arada kavrama sistemi olduğundan motorun güç türbin devri %100’de ve karşısında rotor yükü olmadan dönecektir. Ani yükselme, dolayısıyla tork talebi geldiğinde ise rotor devri %108’ten düşmeye başlayacak fakat motor devri %100’ün altına inene kadar motor güç üretmeyecektir. Rotor devri %100’e indiğinde kavrama sistemi ile motor ve rotor sistemi tekrar birleşecektir. Bu noktada, rotor üzerinde önemli bir yük olacak fakat motor rölanti civarındaki bir güç ile karşılayacağından, rotor ve motor devri ani bir şekilde (örneğin %85 devir seviyelerine) inmeye başlayacaktır. Motor kontrol sistemi, rotor devrini tekrar %100 seviyesine getirene kadar aşırı tork ve devir salınımları meydana gelmiş olacaktır. Bu durum helikopter manevra kabiliyeti açısından olumsuz bir durum sergilemektedir. Bu problemi gidermek için sayısal motor kontrol sistemlerinde helikopterin rotor dönüş devri de ölçülerek rotor devir düşüşü izlenir ve motorun gücü önden artırılarak hedef devirden sapmalar en aza (örneğin ±%3) indirilmektedir.
Burulma Kararlılığı
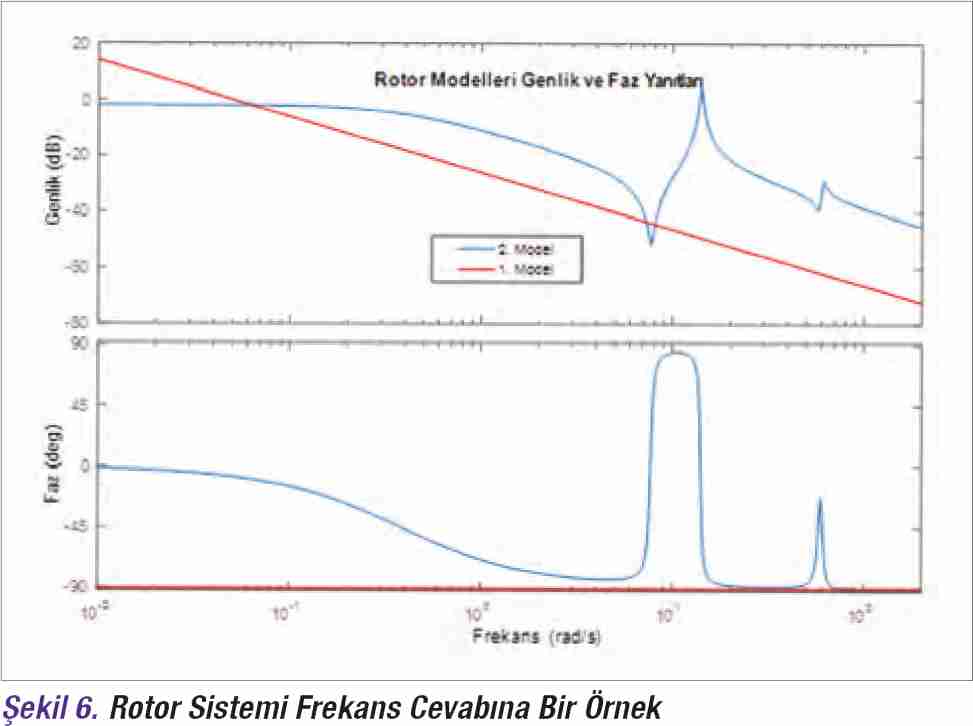
Helikopter ile motor arasındaki diğer bir etkileşim ise, helikopter rotor sistemi üzerindeki rezonans salınımlardır. Bu rezonans salınımlar 2-4 Hz mertebelerinde olduğundan, güç türbin dönüş devri algılayıcısı üzerinden bu salınım seviyesi kontrol sistemi tarafından ölçülmektedir. Motor kontrol sistemi, güç türbin dönüş devrini kontrol ettiğinden ve bu rezonans frekanslar ayarlanmış devirden (%100) sapma meydana getirdiğinden, bu salınımlara tepki verecek ve motor aynı frekans bileşeni içeren yakıt debisini motora gönderecektir. Motor kontrol sistemi, bu frekansı kuvvetlendirecek şekilde motor gücünü, helikopter rotorundaki bu salınımın gittikçe artmasına, dolayısıyla motor ve helikopter rotorunun burulma yönünde rezonansa girmesine sebep olacaktır. Bu etkileşim problemini gidermek için motor kontrol sisteminin bu frekansı kuvvetlendirmeyecek şekilde yakıt vermesi gerekmektedir. Bu yüzden motor kontrol algoritmasında özel fltreleme yöntemleri kullanılarak, güç türbin devir algılayıcısı üzerinden ölçülen sinyaldeki ilgili frekansın büyüklüğü azaltılır ve kontrol sisteminin yakıt üzerindeki kontrol hızı düşürülür. Bu konu hem helikopter hem de motor üreticisini ilgilendirdiğinden taraflar birlikte çalışırlar. Helikopter üreticisi burulma yönündeki rezonans frekanslarını içeren rotor dinamik karakteristiğini sağlarken, motor üreticisi motor kontrol sisteminde gerekli tasarımı ve burulma kararlılık analizlerini gerçekleştirir. Helikopter rotor sisteminin modellenme ayrıntısına göre sistemdeki rezonans frekansları görülebilmekte dolayısıyla bu frekansları tetiklemeyecek kontrolör tasarımları hususunda ayrıntılı kararlar verilebilmektedir.
Yük Paylaşımı
Bazı helikopterlerde birden fazla motor bulunmaktadır. Her iki motorun da kontrol sistemleri güç türbin devrini kontrol etmek isteyeceğinden, motorların paylaştığı helikopter rotor yükleri farklı olabilmektedir. Örneğin, güç türbin devirleri aynı olmasına rağmen motorlardan birisi yükün %30’unu diğeri ise %70’ini karşılayabilir. Bu durum, en azından, motorların ömürlerinin birbirinden farklı olarak ilerlemesine neden olacaktır. Bu problem motor kontrol sistemi ile çözülebilmektedir. Motorlar kendi tork bilgisini diğer motorun kontrol sistemi ile paylaşarak birbirleriyle aynı tork seviyesine gelmeleri sağlanır. Yük paylaşımı, torkların eşlenmesi şeklinde yapılabileceği gibi, gaz jeneratör devirlerinin eşlenmesi veya motor sıcaklıklarının eşlenmesi şeklinde de uygulanabilmektedir.
Tek Motor Etkisiz Kipi
Çok motorlu helikopterlerde sertifkasyon gereksinimi olarak 30 saniye tek motor etkisiz, 2 dakika tek motor etkisiz güç seviyeleri tanımlanmaktadır. Motorlardan birisinin arızalanması durumunda, diğer motorun normal çalışma sınırlarından daha fazla güç verebilmesi beklenmektedir. Motor kontrol sistemleri, diğer motorun sağlık seviyesini takip ederek güç sınırlarını (örneğin tork sınırı) 30 saniye tek motor etkisiz seviyesine otomatik olarak çekebilmektedir.
Tek Motor Etkisiz Eğitim Kipi
Pilotların tek motorun kaybı durumunu tecrübe edebilmeleri için motor frmaları, motor kontrol sistemlerine eğitim özelliği eklemektedir. Bu eğitim özelliği, motorlar çalışır durumdayken pilot tarafından devreye alınıp devreden çıkarılabilmektedir.
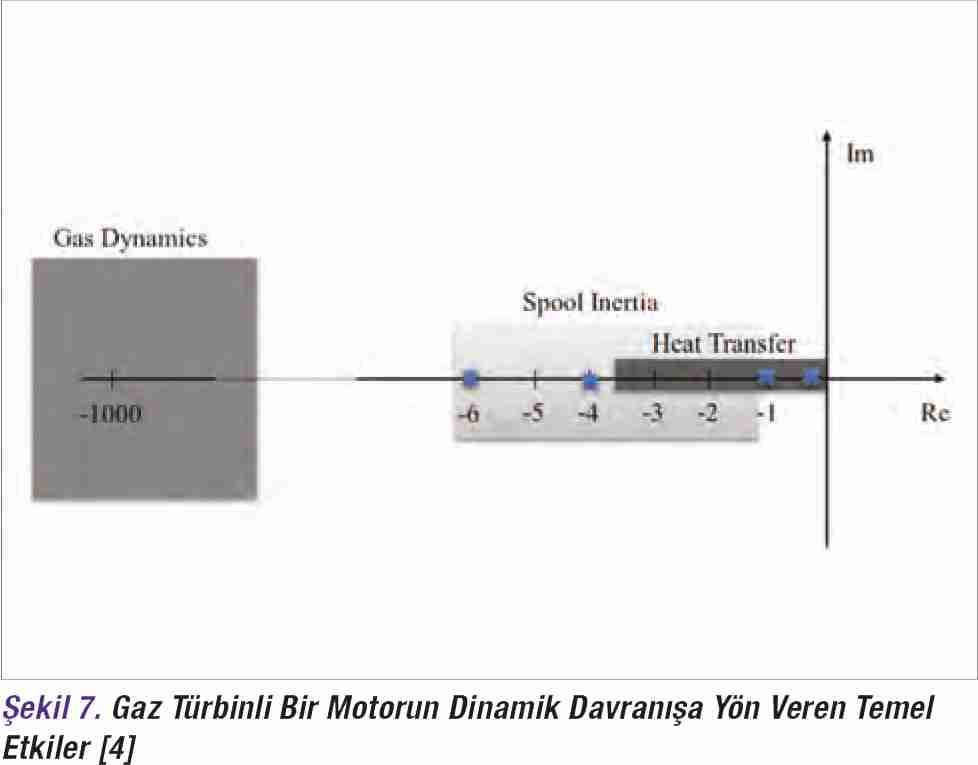
Motor Dinamiğinde Baskın Etkiler
Gaz türbinli bir motorun dinamik davranışa yön veren temel etkiler aşağıdaki şekilde gösterilmiştir. Gaz dinamikleri çok hızlı olduklarından sistemin davranışı şekillendiren baskın etkiler eylemsizliklerden ve ısı geçişinden gelmektedir. Isı geçişi etkileri özellikle motorun ani hızlanma ve yavaşlama durumlarında baskınlaşan, temel olarak motor gövdesinin bir ısıl dengeden diğerine geçerken motor performansına etkisi olarak tanımlanabilecek etkilerdir.
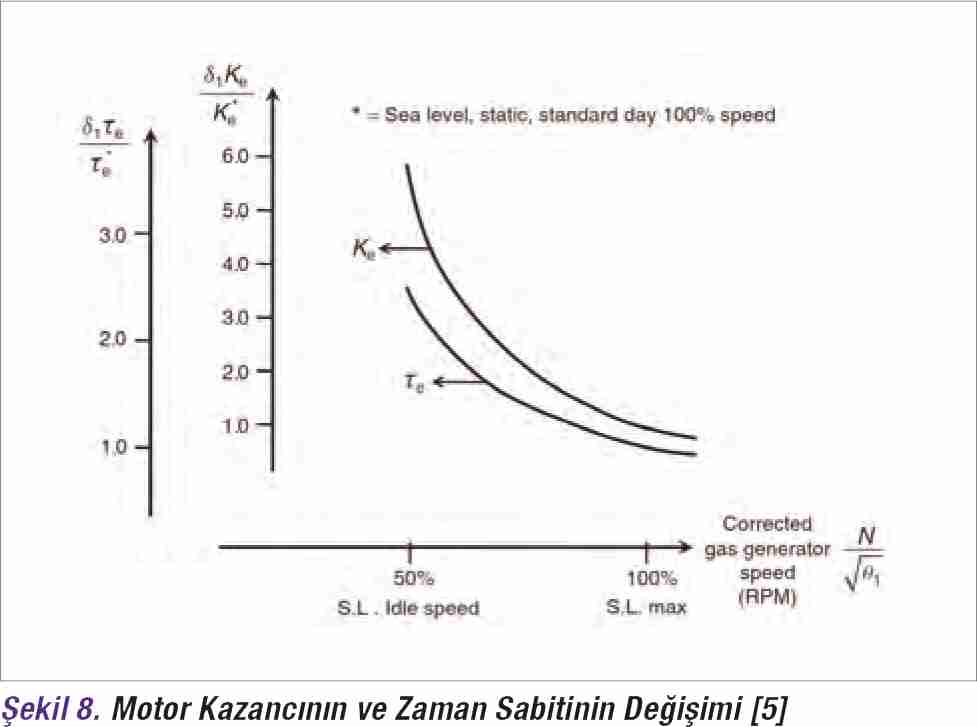
Isıl etkiler göz ardı edilirse gaz türbinli bir motorun dinamik davranışı genel olarak birinci dereceden bir transfer fonksiyonuyla modellenebilir.
Ke (Devir İrtifa)
------------------------
τe (Devir İrtifa)s+1
Motor zaman sabiti τe ve kazancı Ke genel olarak motor devrinin ve motorun çalışmakta olduğu irtifanın birer fonksiyonudur. Bu parametrelerin Şekil 7’de gösterildiği gibi motor devri azaldıkça ve irtifa arttıkça artmaları
beklenir.
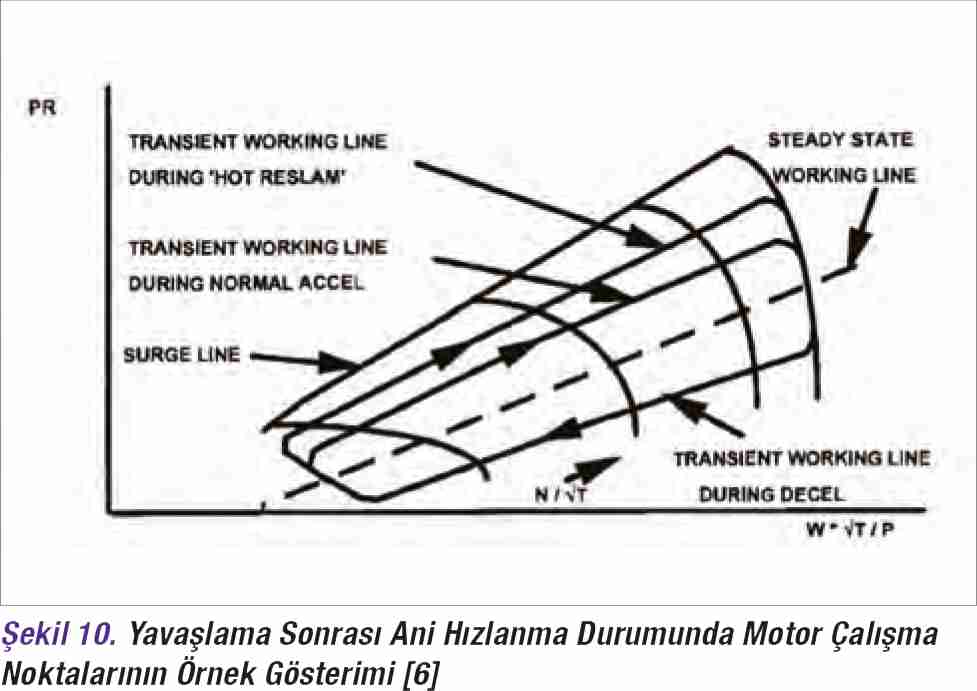
Yavaşlama Sonrası Ani Hızlanma (Reslam)
Bu durum; yüksek güç noktasında bekleyerek sürekli hâl ısıl değerlerine oturmuş motorun, rölanti değerine düşürülmesi akabinde tekrar yüksek güç talebinin hemen oluşması durumunda yaşanmaktadır. Böylece motor, rölantideki sürekli hâl ısıl değerlerine oturamadan tekrar hızlanması nedeniyle sürekli hâl çalışma noktalarından daha fazla uzaklaşarak akış dalgalanma/ayrılma bölgesine doğru yaklaşmaktadır.
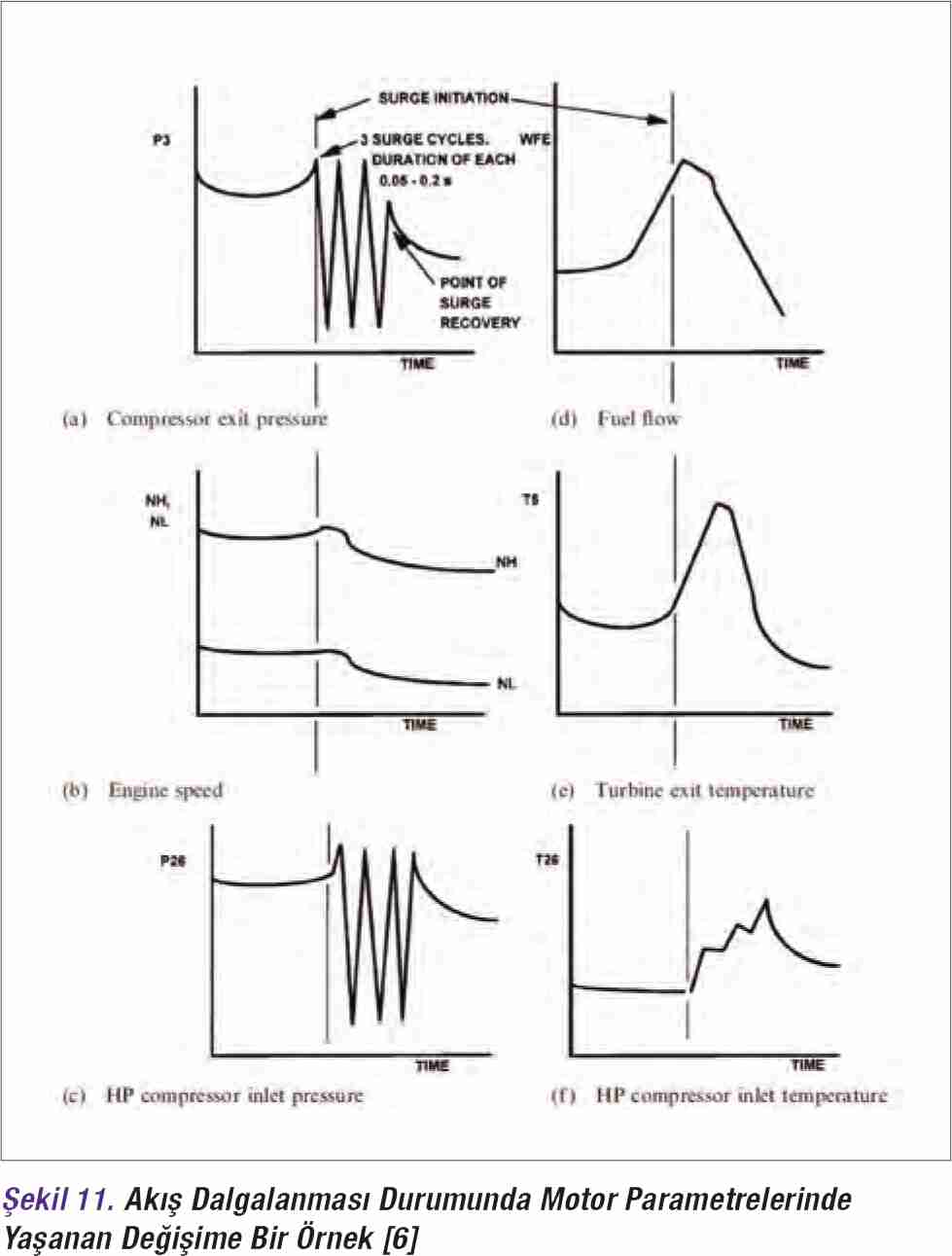
Akış Dalgalanması/Ayrılması (Surge/Stall)
Akış ayrılması problemi, dönen ve kilitli olmak üzere ikiye ayrılmakla birlikte genellikle akış ayrılması probleminin dönen akış ayrılmasının 360 dereceye yayılması sonucunda kilitli akış ayrılması problemi yaşanmaktadır. Akış ayrılmasının başlamasıyla birlikte kompresör hava akışında, basınç oranında ve veriminde azalma görülmekle beraber, motorda aşırı ısınmaların yaşanması büyük problem oluşturabilmektedir.
Kompresörün basınçlandırma kabiliyetini kaybetmesi sebebiyle ilk dalgalanma anında kompresör çıkış basıncında önemli bir düşüş yaşanmaktadır. Kompresör çıkış basıncı tekrar eski hızına döndükten sonra ikinci dalgalanma durumuna girilmekte ve süreç bu şekilde devam etmektedir. Bu durumdan hem kompresör havası tahliye valfnin açılması hem de yakıt akışının azaltılması ile tamamıyla çıkmak mümkün olmaktadır. Motor, boyut ve mimarisine bağlı olmakla birlikte her dalgalanma döngüsü 50ms ile 200ms arasında sürmektedir.
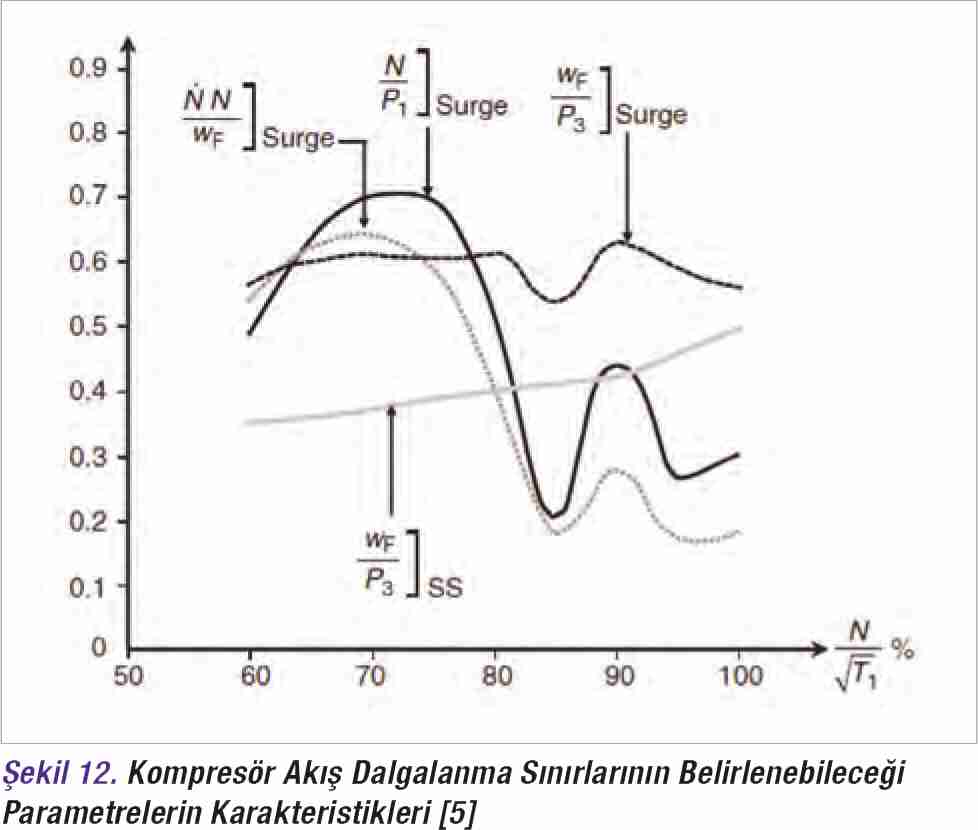
Helikopter motorlarında eskimeye bağlı olarak da çalışma noktalarının zamanla değişmesi, manevra ve çevresel çalışma kabiliyetleri de düşünüldüğünde, bu akış problemlerinin yaşanmaması için motor geçici hal davranışındaki çalışma noktalarının akış dalgalanma noktalarından %20-%25 mertebelerinden uzakta çalışmasına izin verilmektedir. Burada dalgalanma/ayrılma ihtiyat payının bırakılmasında aşağıdaki şekilde verilen parametrelerden yararlanılabilmektedir.
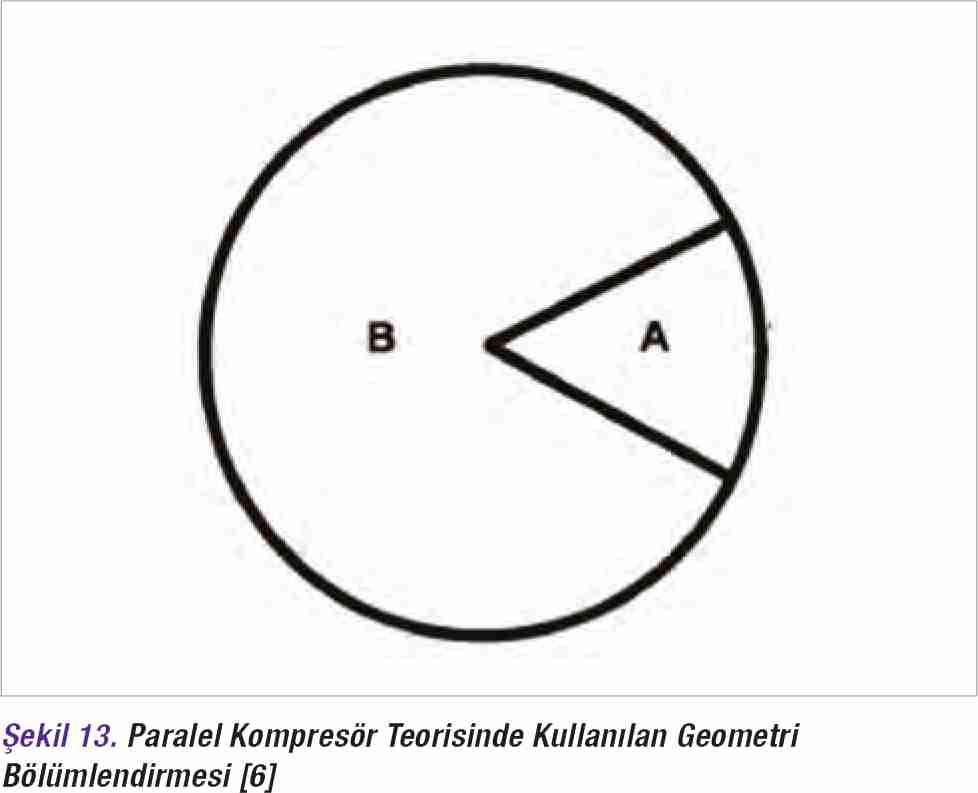
Alık Akışının Bozulması (Air Inlet Distorsion)
Giriş basıncının veya sıcaklığının bölgesel değişimi olan giriş bozulması, önemli ölçüde genel kompresör haritasını etkilemekle birlikte en önemli etkisi olarak akış dalgalanma/ayrılma hattının aşağıya kayması olarak görülmektedir.
Bu durumun değerlendirilmesinde paralel kompresör metodu kullanılmakta ve kompresör çıkış basıncı ve sıcaklığının sabit bir değer olarak dağıldığı kabulü yapılmaktadır. Sonrasında harita ikiye ayrılan paralel akışlar olarak incelenmektedir.
Çapraz rüzgârlar ve yüksek hücum açıları, basınç dağılımında bozunum yaratabilmekte ve bu bozunumun mertebesinin belirlenmesinde ise DC60 katsayısı kullanılmakta yani 360 derecelik inlet geometrisindeki 60 derecelik toplam basınç bozunumu incelenmektedir. Bu analizde 60 derecelik bölgeye en düşük toplam basınç değerleri uygulanırken geri kalan geometride ortalama toplam basınç olduğu düşünülmektedir.
Giriş sıcaklık bozunumu ise zayıf test sistemi tasarımı veya egzoz gazlarının motor girişine dönmesi sonucu oluşabilir. Bu durumun yaşanmasına binaen gerekli akış dalgalanma/ayrılma ihtiyat payının hesaplanmasında yine paralel kompresör teorisinden yararlanılmaktadır. Sıcaklık özelinde bu teori uygulanırken 120 derecelik geometride, en düşük sıcaklık ve geri kalan bölgede ise ortalama sıcaklık olacak şekilde iki farklı akış düşünülmekte ve böylece TC120 katsayısı elde edilmektedir.
Kontrol teorisi açısından bu bozulmanın bir diğer etkisi ise bozunumların algılayıcılara denk gelmesi durumunda alınan sapmış ölçümler üzerinden hesaplamaların kayması olarak görülebilmektedir.
Soğuk Başlatma-Hızlanma (Cold Start-Accel)
Bir hızlanma esnasında, kompresör veya türbin disklerindeki ısıl genleşme karkastaki genleşmeye göre daha yavaş olmaktadır. Bu davranış sebebiyle kanatçıkların uç açıklıkları geçici olarak açılmaktadır. Bunun zıttı olarak yavaşlama sırasında ise kanatçık uçları ile karkas arasında sürtünme problemi ile karşılaşılabilmektedir. Kompresör geometrisindeki bu değişim aslında kompresörün çalışma karakteristiğini etkileyerek akış dalgalanma sınırlarının aşağıya düşmesine ek olarak hava akışında ve verimde düşmelere sebep olabilmektedir.
İstemsiz Hızlanma/Yavaşlama (Uncommended Acceleration/Decelaration)
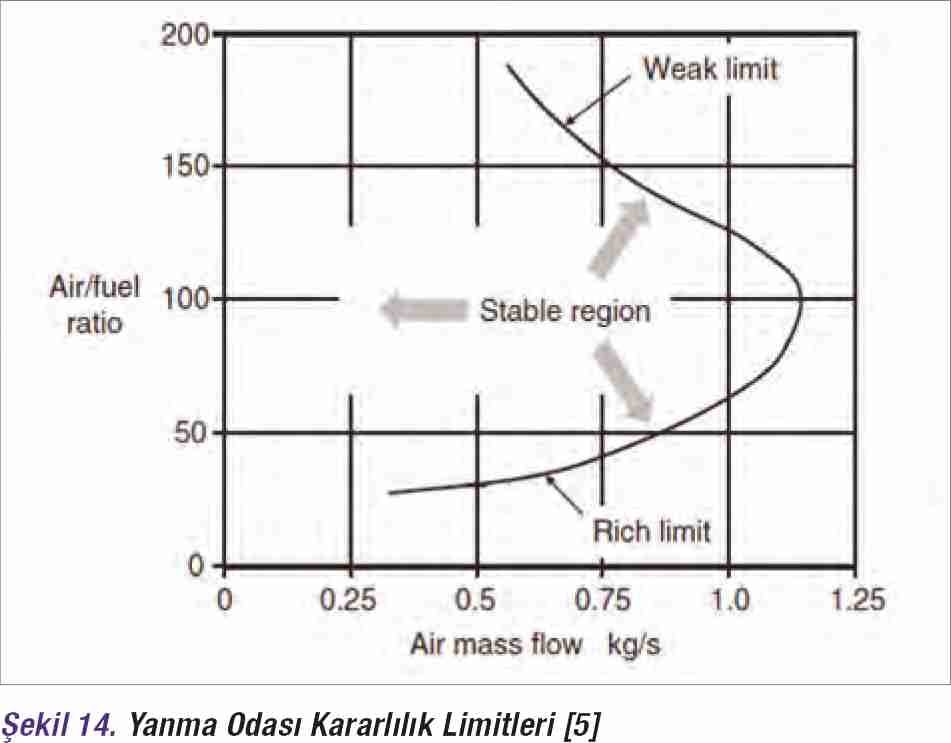
İstemsiz hızlanma/yavaşlama durumları birçok nedenle yaşanabilmektedir. Bu duruma buzlanma, yağmur/dolu/kar girişi, metan gazı girişi, volkanik kül girişi, kum girişi, mekanik ayrılma/sıkışma gibi nedenler yol açabilmektedir. İstemsiz olarak isimlendirilmesinin nedeni olarak, yakıt giriş değişimi aynı yönde veya beklenen oranda çıkış alınamaması gösterilebilir. Burada bahsedilen nedenlerin çoğunluğu doğrudan kompresör verimi ile akış dalgalanması/ayrılması problemlerine yol açarken, ikincil olarak yanma odası kararsızlığına ve dolaylı olarak da türbinde aşırı sıcaklıkların oluşması yönünde etki etmektedir. Yaşanan bu sıkıntılarda motoru kararlı bir çalışma koşulunda tutmak mümkün olmadığında yakıt akışının kesilmesi ya da pilota uyarı verilmesi gerekmektedir. Bu genel durumun haricinde yaşanan istemsiz hareketin kaynağı motorda alev sönmesi ise sistem yeniden ateşlenerek tekrar çalışmaya devam edilebilmektedir. Alev sönmesi durumu ani yakıt ya da hava değişimleri sebebiyle yanma odasının kararlı olarak çalışabileceği yakıt-hava oranı limitlerinin dışına çıkılması halinde yaşanmaktadır.