Havacılık ve uzay uygulamalarında akıllı denetime yönelik gerçek zamanlı kestirim yöntemlerinin kullanımı

02/04/2021 13:44
02/04/2021 13:44
ROKETSAN tarafından altı ayda bir yayımlanan “ROKETSAN Dergi”nin 18. sayısında, ROKETSAN mühendisleri Özlem Demirtaş ve Oğuz Han Altıntaş’ın kaleme aldığı bir makaleye yer veriliyor.
“ROKETSAN Dergi”nin 18. sayısına, mobil uygulamamızın dergi bölümünden ücretsiz olarak ulaşabilirsiniz.
Dergide yer alan “Havacılık ve Uzay Uygulamalarında Akıllı Denetime Yönelik Gerçek Zamanlı Kestirim Yöntemlerinin Kullanımı” başlıklı yazıyı, takipçilerimize sunuyoruz:
HAVACILIK VE UZAY UYGULAMALARINDA AKILLI DENETİME YÖNELİK GERÇEK ZAMANLI KESTİRİM YÖNTEMLERİNİN KULLANIMI
Giriş
Gelişen teknoloji ile birlikte benzetim modelleri karmaşıklaşmakta; güdüm, otopilot ve navigasyon sistemleri tasarımında geliştiriciler güvenilirliği yüksek ve hızlı geliştirme ortamı sağlayabilecek modelleme tekniklerine yönelmektedir. Bu noktada sistem dinamiğinin, geleneksel modelleme teknikleri yerine uygun kestirim yöntemi kullanılarak daha hızlı ve güvenilir modellenmesi mümkündür. Ayrıca, sistem dinamiklerinin operasyon sırasında gerçek zamanlı olarak belirlenebilmesi ile de hava ve uzay gibi değişken ortam koşullarına ve dinamiklere uyum sağlayabilen denetim tasarımları elde etmek mümkündür.
Sistem Dinamiği Kestirimi Nedir?
Sistem dinamiği kestirimi, son modelleme hedefi ve veriler göz önüne alındığında elde edilmek istenen yaklaşık modelleme düzeyine uygun seçimlerin yapılmasını sağlayan bir modelleme bilimi olarak tanımlanabilir. Esasında amacı, tanılanmak istenen sisteme ait ön bilgi ve verilerin kullanılarak matematiksel modellerin oluşturulmasıdır.
Sistem Dinamiği Kestirimine Neden İhtiyaç Duyarız?
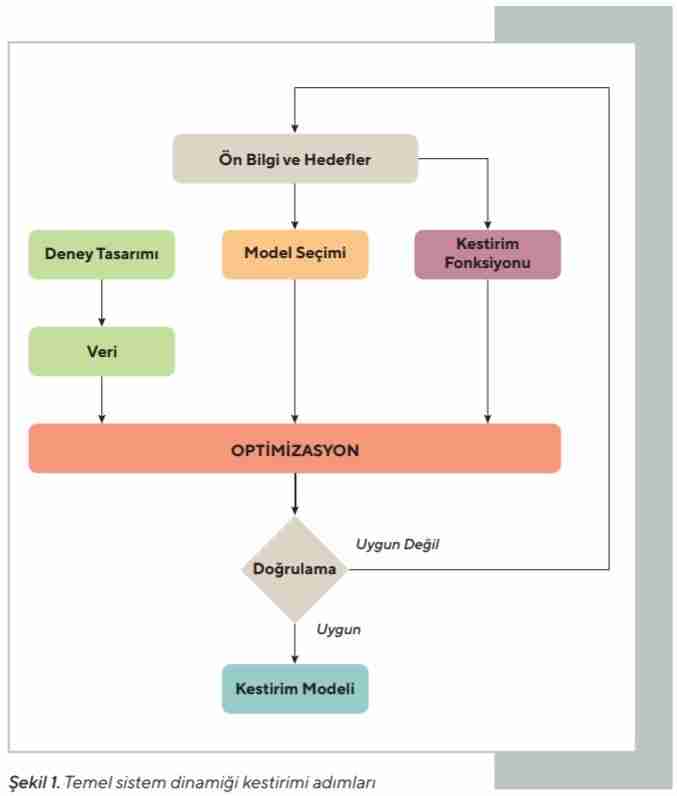
Bir sistemin tam modellemesi üzerine teorik çalışmalar hariç tutulduğunda, matematiksel bir model her zaman gerçek sistemin bir yaklaşımı olarak ele alınır. Çünkü pratikte, sistem karmaşıklığı, sistemin sınırlı ön bilgisi ve gözlenen verilerin eksik kullanılabilirliği sistemin tam bir matematiksel modelinin tanımlanmasını engeller. Bununla birlikte, sistem hakkında tam bilgi ve yeterli veri mevcut olsa bile, modelin bir uygulamada kullanılamayacak kadar karmaşık hale gelmesi nedeniyle çoğu Şekil 1 Temel sistem dinamiği kestirimi adımları Deney Tasarımı Doğrulama Uygun Değil Uygun Model Seçimi Kestirim Modeli Ön Bilgi ve Hedefler Kestirim Fonksiyonu Veri OPTİMİZASYON zaman kesin matematiksel modeller tercih edilememektedir. Bir diğer ihtiyaç ise matematiksel modellerin operasyon koşullarının farklılaşması ile güvenilirliğini kaybetmesinden doğmaktadır. Böyle durumlarda, sistem dinamiği kestirimi, gözlemlenen verilere ve ön sistem bilgisine dayanarak belirli bir sadakat seviyesine kadar modelleme yapılabilmesini sağlamaktadır.
Temel Sistem Dinamiği Kestirimi Adımları Nelerdir?
Sistem dinamiği kestirimi; sistem teorisi, sinyal işleme, optimizasyon ve istatistikten yararlanan güçlü bir disiplinler arası yapı ile karakterize edilmektedir ve nihai amacı kullanıcı gereksinimlerini karşılayan bir model üretmek olan bir dizi faaliyetten oluşmaktadır. Şekil 1’den de görülebileceği üzere bu faaliyetler deney tasarımı, model yapısı seçimi, parametre tahmini ve model doğrulaması gibi bileşenleri içermektedir. Ancak bahsi geçen bu bileşenler asla birbirinden bağımsız adımlar olarak düşünülmemelidir.
Çoğu zaman veriler, uygun bir deney tasarımına yol açarak ön sistem bilgisi ve modelleme hedefleri temelinde toplanır. Ancak gözlemlenen veriler, sisteme ait ön bilgilerin hatta hedeflerin güncellenmesine de yol açabilir. Zengin ve bilgilendirici bir veri kümesi sağlamak için mümkün olduğunca çok ve verimli deney tasarımı kullanılmalıdır.
Model yapısı seçimi, belirli bir amaç için uygun bir model formunun seçilmesini ifade etmektedir. Mevcut olasılıkların çok fazla olması sebebiyle, bu adım sistem dinamiği kestiriminin en önemli kısmını oluşturmaktadır. İncelenen fiziksel sistemin yapısı ya da gerçekleşen fenomeni temsil eden kanunların bilinmesi, model yapısının da büyük ölçüde bilindiği anlamına gelmektedir. Fiziksel olarak modellenmemiş veya eksik dinamiklerin mevcut olduğu durumlarda ise model yapısına yönelik herhangi bir öngörü yapılamayabilir. Bu durumlarda ise yüksek mertebe tanılama modelleri kullanılmakta ve fiziksel sistemin baskın davranışını temsil eden mertebedeki modeller ayrıştırılabilmektedir. Bu yaklaşımlar sistem tanılamanın indirgenmiş mertebe modelleme konularında incelenmektedir.
Parametre tahmini ise model parametre değerlerinin belirli bir doğruluk düzeyinde belirlenmesini ifade etmektedir. Model yapısı belirlendikten sonra bu modeli oluşturan parametrelerin, fiziksel sistemin yapısına uygun bir şekilde kestirilmesi gerekmektedir. Bu noktada optimizasyon yöntemleri aracılığıyla model parametreleri, model ile fiziksel sistemin davranışını eşleyecek bir performans kriteri doğrultusunda elde edilebilmektedir. Uygun ve yüksek performanslı bir optimizasyon yönteminin seçimi ise sistem tanılama prosedüründe dikkat edilmesi gereken bir başka unsurdur.
Son olarak, model doğrulaması, tanılama modelinin fiziksel sistemi arzu edilen ölçüde yansıttığının ve yeterli olduğunun teyit edilmesi sürecini ifade etmektedir. Böylelikle, incelenen ortam koşullarında, model ile fiziksel sistemin belirli bir toleransa kadar aynı girdi-çıktı ilişkisini yakalamış olması temin edilecektir.
Benzetimlerde Sistem Kestirim Yönteminden Nasıl Yararlanıyoruz?
Roketsan’da geliştirilmekte olan benzetimlerde de geleneksel yöntemlerle matematiksel modelinin oluşturulması zor sistemlerle karşılaşılmakta, uygun sadakat seviyesinde bir model oluşturulabilse bile gerçek sistem üzerinde yapılan bir değişikliğin önceden oluşturulmuş modele yansıması uzun zaman alabilmektedir. Bazı durumlarda ise matematiksel modeli oluşturulmuş bir sistemin sadece doğrulamasının yapılabilmesi için bile sayısal bir ikize ihtiyaç duyulmaktadır. Böyle durumlarda geleneksel modelleme teknikleri yerine modele uygun sistem tanılama yönteminden yararlanılması hem geliştiricinin yükünü hafifletmekte hem de geliştirme süresini kısaltmaktadır.
Örneğin bir uçuş benzetiminde, hava aracının hareket denklemlerinin doğrusal yakınsaması transfer fonksiyonlarıyla ifade edilmektedir. Bu transfer fonksiyonlarının girdileri hava aracının kontrol yüzeyi deplasmanları olurken çıktıları ise sensörlerden ölçülen değişkenleridir. Geleneksel modelleme yaklaşımında bu transfer fonksiyonları hava aracının matematiksel modelinin sadeleştirilmesi ile elde edilir. Ancak hava aracına etki eden aerodinamik kuvvetler, itki kuvvetleri ve çevresel etkiler göz önüne alındığında geleneksel yaklaşımlarla elde edilen bu transfer fonksiyonlarının sadakat seviyesi düşük olabilmekte ya da sistem üzerinde yapılan bir değişikliğin benzetime yansıtılması uzun zaman alabilmektedir. Bu nedenlerle geleneksel modelleme teknikleri yerine uygun kestirim yöntemi kullanılarak istenilen mertebede transfer fonksiyonu kestirimlerinin elde edilmesi mümkündür.
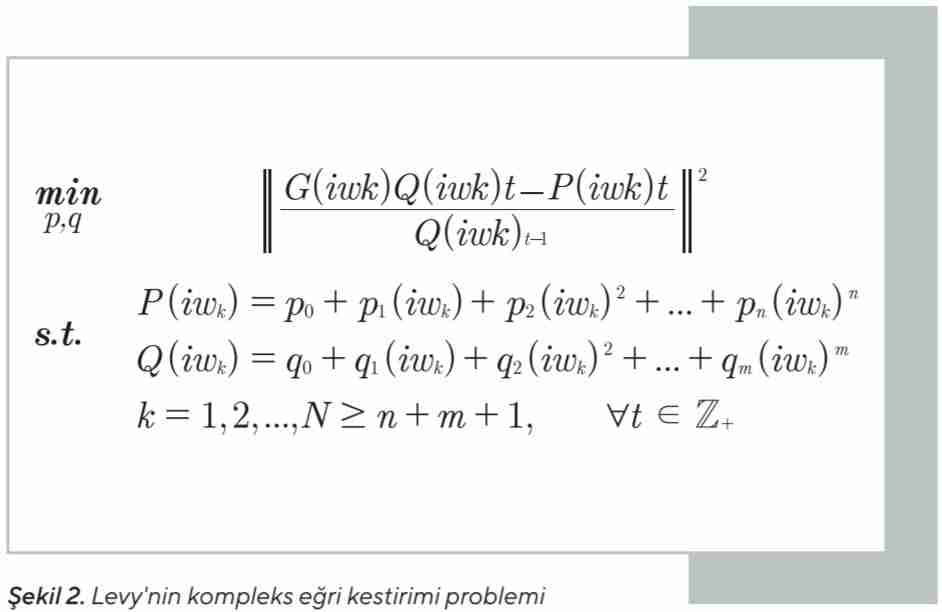
Roketsan’da gerçekleştirdiğimiz çalışmalarda Levy’nin Kompleks Eğri Kestirimi yönteminden yararlanılmıştır. Şekil 2’de maliyet fonksiyonu ve kısıtlamaları verilen bu yöntemde, ilk adımda zaman serileri şeklinde bilinen sistem girdi ve çıktıları kullanılarak frekans cevabı noktaları oluşturulmaktadır. Daha sonra, elde edilen veriler için frekans cevabı noktaları, G(iωk ), ile indirgenmiş modelin frekans cevabı noktaları, Ĝ(iωk ) = P(iωk )/Q(iωk ), arasındaki farkların karelerinin toplamı belirli bir frekans aralığında minimize edilmektedir.
Dolayısıyla bu frekans cevabı noktaları kullanılarak, sistemin istenilen mertebede transfer fonksiyonu kestirimi oluşturulabilmektedir. Metot ile ilgili detaylara ve kaynaklarından ulaşılabilir.
Deneysel Çalışmalar
Yapılan çalışmalar kapsamında, geliştirilmekte olan bir uçuş benzetiminde geleneksel modelleme yöntemleri ile oluşturulmuş transfer fonksiyonlarının katsayıları girdi ve çıktı verileri kullanılarak, çevrimdışı (İng. o¶line) ve çevrimiçi (İng. online) olarak tahmin edilmeye çalışılmıştır.
Çevrimdışı Sürüm
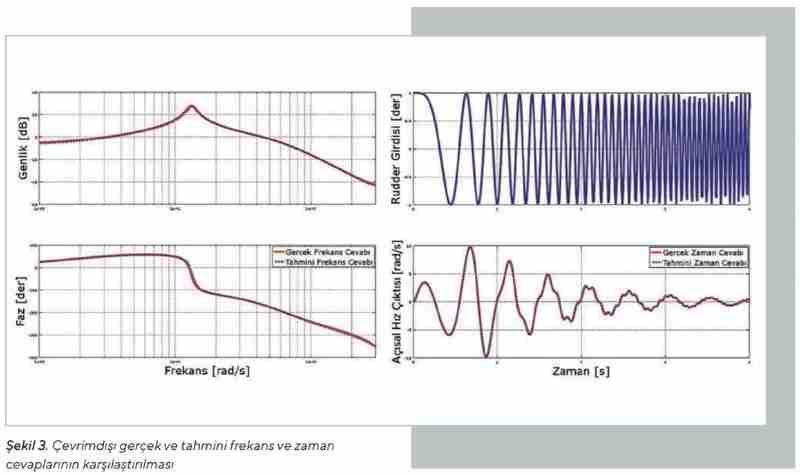
Şekil 3‘de sapma dümeninden (İng. rudder) hava aracının zekseni açısal hızına giden transfer fonksiyonu için gerçek ve tahmini frekans ve zaman cevaplarının yakınlığı gösterilmektedir. Şekilden de görülebileceği üzere, ilgilenilen frekans aralığında gerçek ve tahmini sistem modellerinin genlik ve faz diyagramları birbirleri ile örtüşmektedir.
Doğrulama, yalnızca frekans cevabı üzerinden değil, gerçek ve tahmini zaman cevapları kullanılarak da incelenmiştir. Yine Şekil 3’de test için kullanılan sapma dümeni girdisi ile gerçek ve tahmini açısal hız çıktı değerleri kıyaslanmaktadır. İlgili şekilden de görülebileceği üzere, gerçek sistem çıktısı ile tanılama sonucu elde edilen sistemin çıktısı birbirine yakın çıkmaktadır.
Çevrimiçi Sürüm
Metodun bu sürümünde çevrimdışı sürüm testinde kullanılan transfer fonksiyonunun, çevrimiçi bir yaklaşımla kestirimi Şekil 3. Çevrimdışı gerçek ve tahmini frekans ve zaman cevaplarının karşılaştırılması elde edilmektedir. Kısaca bu sürümde, sistemden önceden belirlenen bir örnekleme hızında veri geldiği varsayılmaktadır. Bu verilerin gruplar halinde (İng. batch) kullanılması ile gerçek zamanlı bir kestirim yapılıp, tahmini ve gerçek çıktılar canlı olarak kıyaslanabilmektedir.
Kompleks eğri kestirimi metodu frekans uzayında çalışan bir metot olduğu için zaman uzayında gelen verilerin Hızlı Fourier Dönüşümü (İng. Fast Fourier Transform - FFT) yöntemi kullanılarak frekans cevabı elde edilmektedir. FFT, bazı sekansların Ayrık Fourier Dönüşümünü (İng. Discrete Fourier Transform - DFT) hesaplayan bir algoritma olup, DFT ise periyodik (veya periyodik varsayılan) bir dalga formunun yapısının sinüs bileşenlerini hesaplar.
Çalışma zamanı açısından incelendiğinde, tek boyutlu bir FFT için geçen süre, sekanstaki nokta sayısı ile ilişkilidir. Sekanstaki toplam nokta sayısı n kabul edilip, n=2K2 x 3K3 x 5K5 x … şeklinde asal çarpanlarına ayrıldığında çalışma zamanının t0 + n(t1 + 2K2t2 + t3 (3K3 + 5K5 + …)) ile orantılı olduğu ortaya çıkmaktadır. Dolayısıyla, veri grubu büyüklüğü 2’nin üstel çarpanları şeklinde seçildiği veya veriler uygun şekilde 0’lar ile genişletildiği (İng. zero-padding) takdirde FFT verimli bir şekilde çalışabilmektedir.
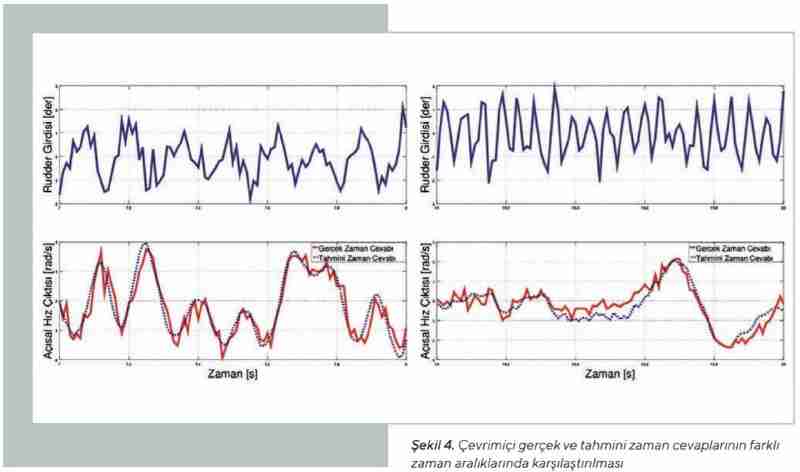
Şekil 4’ten de görülebileceği üzere çevrimdışı çalışmalarda kullanılan kompleks eğri kestirimi yöntemi, gerçek zamanlı olarak elde edilen veri gruplarına uygulandığında da başarılı sonuçlar verebilmektedir. Böylelikle bu yöntem, ilgili problem için, çevrimiçi sistem tanılama yöntemi olarak da kullanılabilmektedir.
Sonuç
Kompleks eğri kestirimi yöntemleri kullanılarak, geliştirilmekte olan bir uçuş benzetiminde hava aracına ait sistem dinamiği kestirimi yüksek doğruluk oranında yapılabilmektedir. Hem çevrimdışı hem çevrimiçi veriler kullanılarak örneklenen bu deneylerle, pratik anlamda tatmin edici transfer fonksiyonu tahminleri elde edilebilmektedir. Böylelikle, denetim tasarımı da gerçek zamanlı olarak, elde edilen sistem dinamiği kestirimleriyle güncellenebilmektedir. Bu tür yaklaşımlarla değişen ortam koşullarına ve sistem dinamiklerine adapte olabilen denetim algoritmaları tasarlanabilmektedir.
Son yıllarda artan makine öğrenmesi kullanım alanı ile birlikte sistem dinamiği kestirim yöntemleri de benzetimlerde sıkça kendine yer bulmaya başlamış olup hem hız hem de güvenilirlik açısından geliştiriciye birçok kolaylık sağlamaktadır. Bu kapsamda karmaşık sistemler için geleneksel modelleme yöntemleri yerine son model hedefine uygun olarak bu teknolojileri kullanmanın kolaylık, hız ve güvenilirlik açısından verimli olacağı değerlendirilmektedir.